肩のゼロポジションとは
肩甲棘と上腕骨の長軸が一致し、肩周りの筋肉がつり合い、能動的な回旋が生じない位置
肩周りの筋肉・関節群に最も負担が少なく、怪我・故障の予防に繋がるとしてスポーツ・武道等において重宝されています。
通常は腕を上げて140度程開いた時の位置と言われます。
しかし、チーターや猫が歩く・走る時や赤子がハイハイする時などに使う「生まれながらの握力把握(パワーグリップ)」に適した肘以遠の筋・神経活動(筋・腱・膜の緊張)が生じていれば、手腕を使うだけで自然と肩甲骨が立ち(立甲)ゼロポジションに合います。
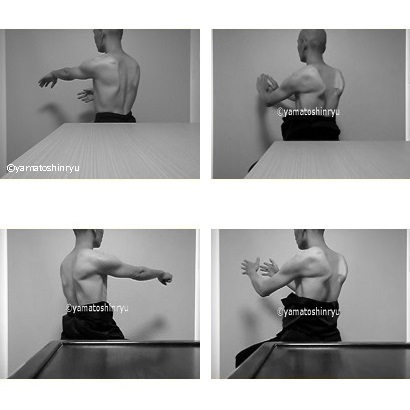
そのため、握力把握に適した前腕の状態を知って自由に保持できれば、無駄な時間を掛けて立甲習得トレーニング等する必要は一切ありません。
四つん這い時には手関節運動連鎖の影響下にあることや、日常生活において精密グリップを多用するようになった人間の筋・神経活動を全く考えずに行う立甲トレーニングなどは弊害等が多く、立甲・ゼロポジションをスポーツ・武道等にすぐに活用したい方にはお勧めできません。
事実に着目し、最低限の人を含む動物の身体構造その他に関する基本知識等を得てからしっかり考えることが、何よりも重要です。
さて、ゼロポジションは脱臼の整復にも活用されています。
整復方法の代表例
- ゼロポジション拳上法
牽引を加えつつ、斜め前側にゆっくりと挙上する。 - スティムソン法
台等の上で腹臥位にし、腕を垂らして錘(約5kg)をつけ牽引する。 - ヒポクラテス法
仰臥位にし、腋窩に足を入れ、腕を持って足側に牽引する。
やり方に違いはあれど基本的に牽引によって行います。
筋肉等が伸張され、
筋紡錘による伸張反射等も働き、
ローテーターカフ等がつり合って整復されます。
肩の脱臼は9割以上が【前方脱臼】で、
転倒などによって【強制的な水平伸展・外旋・外転】が起こされた場合になり易いのです。
このことからも、
手腕を使う運動の際に注意すべき重要ポイントが理解できます。
「どこをどうすればローテーターカフ(手腕の運動の全般に関与)の釣り合い状態を誘導できるのか」
が分かりますから、
力むことなく円滑に体幹・四肢の力の伝達を実現する方法も簡単に分かることとなります。
立甲に関する基本的事項等をしっかりと確認しておきましょう。